Convertizor static de frecventa
pentru controlul turatiei motoarelor asincrone trifazate
Three-phase induction motor frequency converter
pentru controlul turatiei motoarelor asincrone trifazate
Three-phase induction motor frequency converter
mai-iunie 2007
Lucrare executata in colaborare cu ing. M.I. Oprea.
Indrumator: prof. dr. ing. Cristian Bucur.
Multumiri speciale dlui ing. Adrian Geana.
Lucrare executata in colaborare cu ing. M.I. Oprea.
Indrumator: prof. dr. ing. Cristian Bucur.
Multumiri speciale dlui ing. Adrian Geana.

Cu sistemul de comanda cu microprocesor si convertizor static in tehnologie IGBT putem realiza optimizarea functionarii a o serie de echipamente industriale, prin corelarea optima a regimului de lucru cu consumurile energetice in flux continuu
si cu posibilitatea integrarii in eventuale sisteme de dispecerizare.
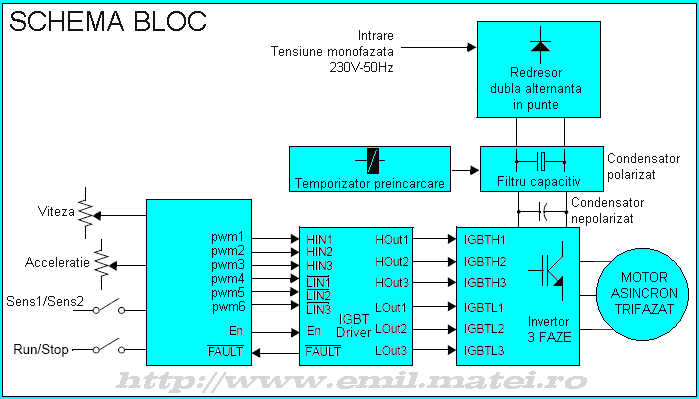
Aparatul contine o punte redresoare monofazata necomandata cu diode, un circuitul intermediar de tensiune continua, circuit realizat cu condensatoare de filtrare si temporizator de preincarcare, un invertor trifazat de tensiune in tehnologie IGBT si un circuit cu microcontroller dedicat, preprogramat.
Realizarea echipamentului face posibila alimentarea unui motor asincron trifazat, de la reteaua monofazata de alimentare cu energie electrica cu facilitatea reglajului continuu al turatiei si acceleratiei. Un alt deziderat este de a obtine un coeficient de utilizare maxim in conditiile unui consum specific de energie minim.
Caracteristici functionale :scurtcircuit supratensiune in circ. intermediar supratemperatura
La aparitia oricarei situatii de defect, invertorul se blocheaza, impulsurile de comanda la tranzistoarele IGBT fiind
blocate, alimentarea motorului este intrerupta.
Introdus in echipamente de actionari industriale specifice, sistemul asigura :
Aparatul contine o punte redresoare monofazata necomandata cu diode, un circuitul intermediar de tensiune continua, circuit realizat cu condensatoare de filtrare si temporizator de preincarcare, un invertor trifazat de tensiune in tehnologie IGBT si un circuit cu microcontroller dedicat, preprogramat.
Realizarea echipamentului face posibila alimentarea unui motor asincron trifazat, de la reteaua monofazata de alimentare cu energie electrica cu facilitatea reglajului continuu al turatiei si acceleratiei. Un alt deziderat este de a obtine un coeficient de utilizare maxim in conditiile unui consum specific de energie minim.
Caracteristici functionale :
- Tensiunea nominala de alimentare : max.230 Vc.a
- Frecventa tensiunii de alimentare : 50 Hz
- Puterea nominala de iesire : 0.63 KW
- Capacitate de suprasarcina : 2 Pn / 1 min.
- Tensiunea de iesire : 3x200Vc.a
- Frecventa de iesire : max 50Hz
- Sistem de racire : ventilatie fortata
- pornit/oprit
- schimbare sens
- reglare turatie (continua)
- reglare acceleratie (continua)
- pornit/oprit (led)
- prezenta tensiune in circuitul intermediar pana la descarcarea condensatoarelor de filtraj la o valoare de tensiune nepericuloasa (led)
Introdus in echipamente de actionari industriale specifice, sistemul asigura :
- cresterea in mod natural a factorului de putere;
- cresterea randamentului motorului;
- cresterea coeficientului de utilizare;
- reducerea sensibila a costurilor specifice;
- reducerea uzurii elementelor in si marirea duratei de viata.
Mai mult de jumatate din energia electrica produsa in tarile cu industrie puternica, este
consumanta de catre motoarele electrice, ponderea cea mai mare avand-o motoarele asincrone, care castiga din ce in cel mai mult teren in urma progreselor inregistrate in domeniul componentelor electronice de putere specifice comutatiei statice precum si a sistemelor de comanda, ele fiind tot mai frecvent echipate cu convertoare statice de frecventa, care fac posibila varierea turatiei in limite relativ largi, prin reglarea simultana atat a amplitudinii cat si a frecventei tensiunii de alimentare.
Este unanim recunoscut ca motorul asincron s-a impus prin simplitate constructiva, robustete si randament, el fiind inca cel mai fiabil si cel mai simplu din punct de vedere constructiv, faptul ca in majoritatea cazurilor nu necesita practic nici un fel de intretinere constituind, de asemenea, un avantaj important.
Dezvoltarea pe scara larga a convertoarelor statice de frecventa a permis motorului asincron, utilizat anterior cu preponderenta in aplicatii de turatie constanta, cu alimentare directa din retea, sa fie preferat in prezent si in domeniile populate anterior in cea mai mare parte de catre motoare de curent continuu (aplicatii care necesita turatii variabile).
Proiectarea de actionari electrice presupune si alegerea unui motor electric de actionare ale carui caracteristici (turatie, moment de rotatie si plaja de reglare) sunt stabilite �n functie de cerintele proiectului. Din considerentele mentionate mai sus, tipul de motor electric utilizat masiv in actionari electrice pe plan mondial este motorul asincron trifazat. Constructia sa robusta si simpla, gradul ridicat de protectie si ipodimensiunile standardizate reprezinta caracteristicile remarcabile ale celui mai apreciat si utilizat tip de electromotor.
Este unanim recunoscut ca motorul asincron s-a impus prin simplitate constructiva, robustete si randament, el fiind inca cel mai fiabil si cel mai simplu din punct de vedere constructiv, faptul ca in majoritatea cazurilor nu necesita practic nici un fel de intretinere constituind, de asemenea, un avantaj important.
Dezvoltarea pe scara larga a convertoarelor statice de frecventa a permis motorului asincron, utilizat anterior cu preponderenta in aplicatii de turatie constanta, cu alimentare directa din retea, sa fie preferat in prezent si in domeniile populate anterior in cea mai mare parte de catre motoare de curent continuu (aplicatii care necesita turatii variabile).
Proiectarea de actionari electrice presupune si alegerea unui motor electric de actionare ale carui caracteristici (turatie, moment de rotatie si plaja de reglare) sunt stabilite �n functie de cerintele proiectului. Din considerentele mentionate mai sus, tipul de motor electric utilizat masiv in actionari electrice pe plan mondial este motorul asincron trifazat. Constructia sa robusta si simpla, gradul ridicat de protectie si ipodimensiunile standardizate reprezinta caracteristicile remarcabile ale celui mai apreciat si utilizat tip de electromotor.
De ce trifazat? Pentru ca motorul de inductie trifazat este
singurul tip la care campul magnetic invartitor este creat in
mod natural in stator datorita insasi naturii alimentarii
(Toate motoarele electrice folosesc campul magnetic invartitor pentru a pune in miscare rotorul).
Pentru crearea campului magnetic invartitor, celelalte tipuri de motoare fie ca au nevoie de componente externe, cum este cazul motorului de inductie de curent alternativ monofazat, fie ca folosesc comutatia electronica ori mecanica asa cum e in cazul motoarelor de curent continuu.
Dintre motoarele de inductie trifazate, cel mai raspandit (peste 90%) este tipul cu rotorul in scurtcircuit (rotor in colivie de veverita), pe stator fiind plasata infasurarea trifazata care produce campul magnetic invartitor, infasurarea rotorului fiind realizata din bare de aluminiu sau cupru scurtcircuitate la capete de inele transversale.
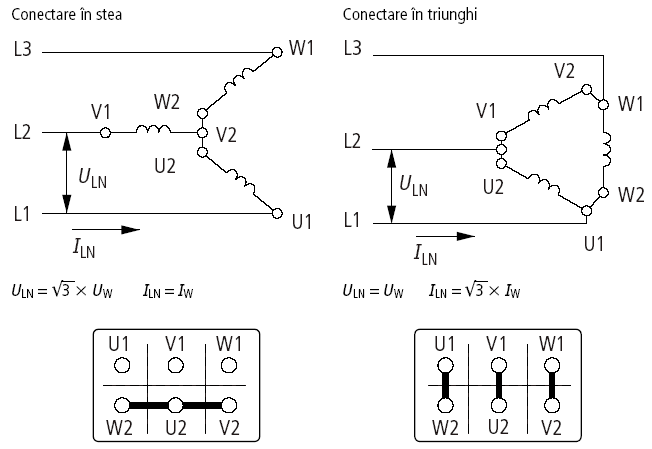
Sensul de rotatie se inverseaza schimband sensul de rotatie al campului magnetic invartitor, schimband doua faze intre ele.
Datele nominale electrice si mecanice ale motorului sunt tiparite pe eticheta fixata pe acesta. Conexiunile electrice ale motoarelor asincrone trifazate se fac , de regula, prin 6 borne. �n acest mod se pot realiza doua moduri de conectare, respectiv �n stea si �n triunghi.
Pentru crearea campului magnetic invartitor, celelalte tipuri de motoare fie ca au nevoie de componente externe, cum este cazul motorului de inductie de curent alternativ monofazat, fie ca folosesc comutatia electronica ori mecanica asa cum e in cazul motoarelor de curent continuu.
Dintre motoarele de inductie trifazate, cel mai raspandit (peste 90%) este tipul cu rotorul in scurtcircuit (rotor in colivie de veverita), pe stator fiind plasata infasurarea trifazata care produce campul magnetic invartitor, infasurarea rotorului fiind realizata din bare de aluminiu sau cupru scurtcircuitate la capete de inele transversale.
Sensul de rotatie se inverseaza schimband sensul de rotatie al campului magnetic invartitor, schimband doua faze intre ele.
Datele nominale electrice si mecanice ale motorului sunt tiparite pe eticheta fixata pe acesta. Conexiunile electrice ale motoarelor asincrone trifazate se fac , de regula, prin 6 borne. �n acest mod se pot realiza doua moduri de conectare, respectiv �n stea si �n triunghi.
In general aplicatiile performante cu motoare asincrone se compun din:
De exemplu, in foarte multe cazuri, din considerente economice, redresorul nu este comandat, ci clasic, cu diode, cu transfer unidirectional de energie.
- redresor comandat cu modulatie in latime a pulsurilor (PWM)
- filtru LC (sau C)
- invertor PWM
De exemplu, in foarte multe cazuri, din considerente economice, redresorul nu este comandat, ci clasic, cu diode, cu transfer unidirectional de energie.
Este si cazul aplicatiei de fata care propune o varianta practica ultra low cost pentru
controlul motoarelor asincrone trifazate, abordabila si de catre cei cu mai putina experienta in controlul motoarelor, axata in mare parte pe solutii hardware, avand in componenta si un circuit specializat incluzand un microcontroller preprogramat.
Schema bloc este urmatoarea:
Schema bloc este urmatoarea:


Solutia aleasa pentru partea de putere a invertorului PWM este bazata pe componente discrete, tranzistoare MOSFET sau IGBT, cu drivere
separate pentru fiecare din cele 3 canale.


Conform schemei de mai sus, care este tipica pentru fiecare din cele 3 canale, se executa placile de circuit imprimat, circuitele fiind proiectate pe un singur layer petru a putea fi abordate si de catre cei cu dotare mai modesta.
Configuratia cablajului e identica pentru cele 3 placi, dar numai una se implanteaza integral, de pe celelalte doua lipsind componentele U4, C6, C7, R9, R12, JP1, JP2 si J3, corespunzatoare circuitului de shut-down care e comun celor 3 canale.
Proiectarea a avut in vedere o tensiune de lucru de peste 300V, tranzistoarele alegandu-se la 500-600V. curentii vehiculati corespund unei puteri a motorului de max 1KW, cat are in vedere prototipul.
PCB No.1 (Faza R)

PCB No.2 (Faza S)

PCB No.3 (Faza T)
Alimentarea se face de la reteaua monofazata de curent alternativ de 230V/50Hz.
Tensiunea se redreseaza cu o punte redresoare corespunzatoare si este apoi bine filtrata
cu ajutorul unor condensatoare electrolitice de mare capacitate, avand un ESR redus.
Pe durata catorva secunde de la conectare, curentul de incarcare al condensatoarelor electrolitice este limitat de catre o rezistenta serie (R3), care apoi este suntata de contactele unui releu lucrand ca timer de preincarcare.
Blocul redresor filtrat livreaza o tensiune de circa 320V. Un divizor rezistiv format din rezistoarele R6-R10 costituie senzorul de tensiune care furnizeaza microcontrollerului o fractiune din tensiunea continua de pe bara BUS+ a redresorului de putere. Informatia de tensiune se obtine pe rezistorul R6, fiind disponibila pe conectorul J5.
Rezistoarele R4 si R5 asigura descarcarea condensatoarelor la deconectare, LED-ul inseriat cu acestea semnalizand prezenta tensiunii periculoase pana la descarcarea completa a condensatoarelor de filtraj C4-C5.
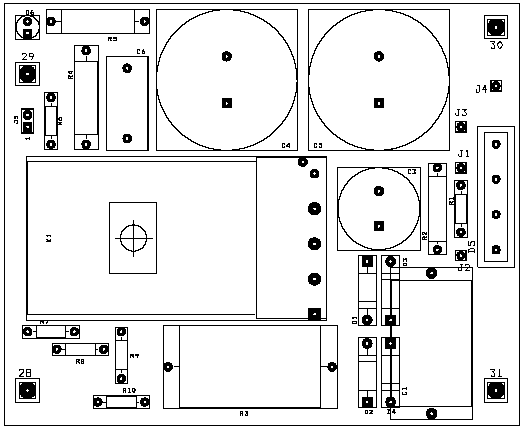
Schema se prezinta mai jos, si se executa practic conform desen PCB No.4 - Redresor filtrat, prezentat in continuare.
Blocul redresor filtrat livreaza o tensiune de circa 320V. Un divizor rezistiv format din rezistoarele R6-R10 costituie senzorul de tensiune care furnizeaza microcontrollerului o fractiune din tensiunea continua de pe bara BUS+ a redresorului de putere. Informatia de tensiune se obtine pe rezistorul R6, fiind disponibila pe conectorul J5.
Rezistoarele R4 si R5 asigura descarcarea condensatoarelor la deconectare, LED-ul inseriat cu acestea semnalizand prezenta tensiunii periculoase pana la descarcarea completa a condensatoarelor de filtraj C4-C5.
Schema se prezinta mai jos, si se executa practic conform desen PCB No.4 - Redresor filtrat, prezentat in continuare.
Schema de principiu - Redresor filtrat
")
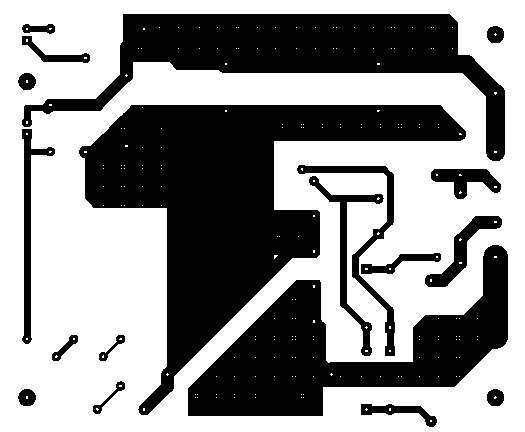
PCB No.4 - Redresor filtrat
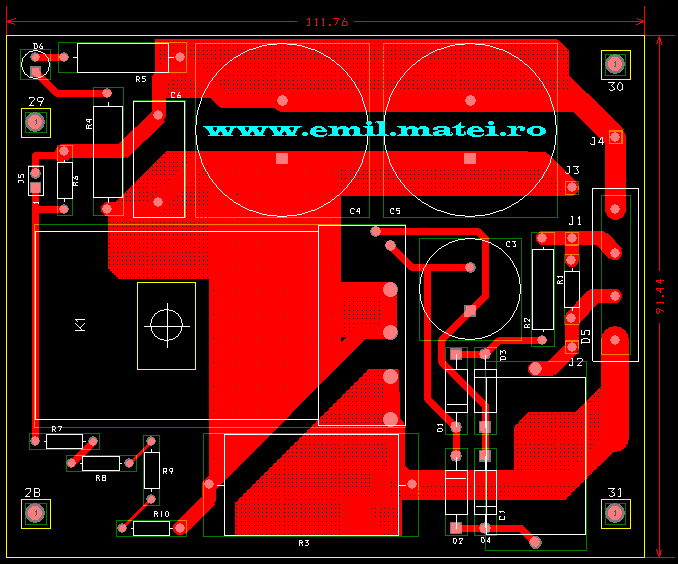
Detalii executie PCB No.4 - Redresor filtrat

Dupa executia si asamblarea celor 3 module care compun etajele finale ale invertorului,
precum si a modulului redresor filtrat, testat in prealabil separat, se pot face
primele teste cu sarcina la iesire. Pentru inceput, se monteaza la iesire sarcini rezistive. Impulsurile se aplica la cele 6 intrari de semnal PWM.
Pentru evitarea deschiderii simultane a doua tranzistoare de pe acelasi brat, montajul se completeaza cu un circuit de interblocare a semnalelor de comanda, care asigura o protectie hardware eficienta. Circuitul de interblocare este esential pe durata testelor in aceasta etapa, iar optional, poate fi inclus si in varianta definitiva, ca o masura suplimentara de protectie, desi semnalul furnizat de microcontroller asigura interblocarea mentionata prin software.
Un astfel de circuit este prezentat in cele ce urmeaza:
Pentru evitarea deschiderii simultane a doua tranzistoare de pe acelasi brat, montajul se completeaza cu un circuit de interblocare a semnalelor de comanda, care asigura o protectie hardware eficienta. Circuitul de interblocare este esential pe durata testelor in aceasta etapa, iar optional, poate fi inclus si in varianta definitiva, ca o masura suplimentara de protectie, desi semnalul furnizat de microcontroller asigura interblocarea mentionata prin software.
Un astfel de circuit este prezentat in cele ce urmeaza:

Circuitul e gandit ca un modul universal pentru montaje de acest gen, asa ca a fost
prevazut atat cu iesiri la care semnalele livrate sunt in faza cu cele aplicate pe intrari, cat si cu semnale in antifaza. Semnalele de intrare se aplica prin conectoarele J1-J2-J3, semnalele de iesire fiind disponibile la conectoarele J4-J5-J6, respectiv J7-J8-J9.
Placa de circuit imprimat cu logica de interblocare a fost proiectata pe 2 layere:
Placa de circuit imprimat cu logica de interblocare a fost proiectata pe 2 layere:
PCB No.5 - Modul interblocare

Detalii executie PCB No.5 - Modul interblocare

Modulul microcontroller
Dezvoltarile relativ recente in domeniul comenzii motoarelor asincrone au dus la crearea
unui controller, MC3PHAC, care are implementati algorimti de comanda a motoarelor asincrone. Este o solutie ieftina si usor de implementat in diferite aplicatii.
Controllerul este preprogramat, dar utilizatorul il poate configura si programa in functie de necesitatile si aplicatiile in care va fi folosit. O atentie sporita a fost data sigurantei si diferitelor protectii.
La baza functionarii MC3PHAC sta un modul avansat PWM creat special pentru a indeplini cele mai riguroase cerinte in comanda motoarelor asincrone. Ceasul modulului este la 8MHz (125 ns intre 2 fronturi crescatoare ) si genereaza sase semnale modulate in latime in grupuri de cate trei semnale complementare. Acest lucru permite conectarea lui MC3PHAC direct la invertoare pentru cele trei faze. Polaritatea partii inalte a semnalelor PWM poate fi specificata separat de polaritatea partii joase. Timpul mort este introdus intre timpul de pornire a perechii de semnale complementare si poate fi setat pentru orice valoare cuprinsa intre 0 si 32 microsecunde, cu pasul de 125 ns.
Frecventa PWM poate avea una din valorile de mai jos, cu rezolutia aferenta.
Tensiunea de intrare
( MUX_IN ) [V] --- Frecventa PWM [KHz] --- Rezolutia PWM [biti]
0 la 1 V ---------------- 5,291 KHz --------- 9,6 biti
1,5 la 2,25 V --------- 10,5821 KHz -------- 8,6 biti
2,75 la 3,5 V --------- 15,873 KHz --------- 8 biti
4 la 5 V --------------- 21,164 KHz --------- 7,6 biti
MC3PHAC este diponibil, printre altele, si in capsula PDIP cu 28 de pini, versiune in care a fost utilizat in prezenta aplicatie.
MC3PHAC poate functiona in unul din doua moduri: independent sau integrat (host). Selectia modului de operare are loc la pornire si este specificata de starea pinului 20.
Descriere succinta a fiecarui pin: (Nr pinului - Numele pinului - Descriere
1 - VREF ADC VREF High = intrarea tensiunii de referinta pentru placa ADC. Pentru un semnal cat mai bun acest pin trebuie legat la VDDA.
2 - RESET �0� pe acest pin reseteaza MC3PHAC. Toate iesirile PWM sunt setate pe inalta impedanta. Acest pin este unul bidirectional ce permite resetarea intregului sistem. Se muta in �0� atunci cand este detectat un reset in sistem (ex. pierderea ceasului).
3 - VDDA VDD (Analogic) = alimenteaza portiunile analogice ale MC3PHAC, care includ si circuitul de generare al semnalului de tact (PLL) si ADC.
4 - VSSA VSS (Analogic) = alimentarea (masa) portiunilor analogice ale MC3PHAC, care includ si circuitul de generare al semnalului de tact (PLL) si ADC.
5 - OSC2 Osc Out � iesirea oscilatorului cu cristalul de cuart (a circuitului de ceas). Corectitudinea ceasului este data de oscilatorul de 4 MHz.
6 - OSC1 Osc In � intrarea oscilatorului cu cristalul de cuart (a circuitului de ceas). Poate accepta si un semnal extern. Corectitudinea ceasului este data de oscilatorul de 4 MHz.
7 - PLLCAP PLL Damp � un condensator legat de la acest pin la masa afecteaza stabilitatea si timpul de reactie al circuitului de ceas PLL. Valori mari dau o stabilitate mai buna. O valoare tipica este de 0.1 microFarad.
8 - PWMPOL_BASEFREQ PWM Pol/Base Speed � intrare specifica initializarii care determina polaritatea PWM si viteza de baza (50 sau 60 Hz)
9 - PWM_U_TOP PWM U Top � semnalul de iesire PWM pentru comanda tranzistorului de sus pentru faza U
10 - PWM_U_BOT PWM U Bottom - semnalul de iesire PWM pentru comanda tranzistorului de jos pentru faza U
11 - PWM_V_TOP PWM V Top - semnalul de iesire PWM pentru comanda tranzistorului de sus pentru faza V
12 - PWM_V_BOT PWM V Bottom - semnalul de iesire PWM pentru comanda tranzistorului de jos pentru faza V
13 - PWM_W_TOP PWM W Top - semnalul de iesire PWM pentru comanda tranzistorului de sus pentru faza W
14 - PWM_W_BOT PWM W Bottom - semnalul de iesire PWM pentru comanda tranzistorului de jos pentru faza W
15 - FAULTIN Fault In � �1� pe aceasta intrare dezactiveaza imediat iesirile PWM. Cand pinul va trece in starea �0� se va reincerca activarea.
16 - PWMFREQ_RxD PWM Freq/Rx Data � in modul independent acest pin este o iesire care trece �n �0� pentru a indica faptul ca pinul MUX_IN citeste o tensiune analogica pentru a determina o frecventa PWM dorita. In modul integrat (host) acest pin este o intrare ce primeste date serial (SCI).
17 - RETRY_Tx Retry Time/Tx Data � in modul independent acest pin este o iesire care trece �n �0� pentru a indica faptul ca pinul MUX_IN citeste o tensiune analogica pentru a specifica un timp de pauza dupa o eroare inainte de a reactiva iesirile PWM. In modul integrat acest pin este o intrare ce primeste date serial.
18 - RBRAKE R Brake � acest pin este o iesire care trece �n starea �1� de fiecare data cand tensiunea de alimentare depaseste o valoare prestabilita. Acest semnal se doreste sa conecteze un rezistor in paralel pe capacitatea de filtraj a alimentarii pentru a preveni cresterea tensiunii.
19 - DT_FAULTOUT Dead-Time/Fault Out � in modul independent acest pin este este o iesire care trece �n �0� pentru a indica faptul ca pinul MUX_IN citeste o tensiune analogica pentru a specifica timpul mort intre starile de pornire ale semnalelor PWM de sus si jos pentru o faza data. In modul integrat este un pin care trece �n �0� de fiecare data cand apare o eroare.
20 - VBOOST_MODE Vboost/Mode Select � la pornire daca acest pin se afla �n starea �1� rezulta modul independent de functionare, daca �0� � modul integrat. In modul independent este folosit si ca o iesire care daca trece �n starea �0� indica faptul ca pinul MUX_IN detecteaza o tensiune analogica ce specifica valoare tensiunii de boost a motorului.
21 - VDD +5 V alimentare pentru MC3PHAC
22 - VSS masa pt alimentarea de +5 V pentru MC3PHAC
23 - FWD Forward/Reverse � acest pin este o intrare care stabileste �n ce sens se va roti motorul.
24 - START Start/Stop � acest pin este o intrare care stabileste daca motorul se roteste sau nu.
25 - MUX_IN Mux In � In modul independent, in timpul initializarii, este un pin care determina polaritatea PWM si viteza de baza. Altfel, este o intrare analogica ce citeste anumite nivele de tensiune corespunzatoare parametrilor sistemului MC3PHAC.
26 - SPEED Speed In - In modul independent, in timpul initializarii, este un pin care determina polaritatea PWM si viteza de baza. Altfel, este o intrare analogica ce citeste nivelul tensiunii corespunzator vitezei motorului.
27 - ACCEL Acceleration In - In modul independent, in timpul initializarii, este un pin care determina polaritatea PWM si viteza de baza. Altfel, este o intrare analogica ce citeste nivelul tensiunii corespunzator acceleratiei motorului.
28 - DC_BUS Dc Bus In - In modul independent, in timpul initializarii, este un pin care determina polaritatea PWM si viteza de baza. Altfel, este o intrare analogica ce citeste nivelul de tensiune proportional cu tensiunea de alimentare.
Controllerul este preprogramat, dar utilizatorul il poate configura si programa in functie de necesitatile si aplicatiile in care va fi folosit. O atentie sporita a fost data sigurantei si diferitelor protectii.
La baza functionarii MC3PHAC sta un modul avansat PWM creat special pentru a indeplini cele mai riguroase cerinte in comanda motoarelor asincrone. Ceasul modulului este la 8MHz (125 ns intre 2 fronturi crescatoare ) si genereaza sase semnale modulate in latime in grupuri de cate trei semnale complementare. Acest lucru permite conectarea lui MC3PHAC direct la invertoare pentru cele trei faze. Polaritatea partii inalte a semnalelor PWM poate fi specificata separat de polaritatea partii joase. Timpul mort este introdus intre timpul de pornire a perechii de semnale complementare si poate fi setat pentru orice valoare cuprinsa intre 0 si 32 microsecunde, cu pasul de 125 ns.
Frecventa PWM poate avea una din valorile de mai jos, cu rezolutia aferenta.
Tensiunea de intrare
( MUX_IN ) [V] --- Frecventa PWM [KHz] --- Rezolutia PWM [biti]
0 la 1 V ---------------- 5,291 KHz --------- 9,6 biti
1,5 la 2,25 V --------- 10,5821 KHz -------- 8,6 biti
2,75 la 3,5 V --------- 15,873 KHz --------- 8 biti
4 la 5 V --------------- 21,164 KHz --------- 7,6 biti
MC3PHAC este diponibil, printre altele, si in capsula PDIP cu 28 de pini, versiune in care a fost utilizat in prezenta aplicatie.
MC3PHAC poate functiona in unul din doua moduri: independent sau integrat (host). Selectia modului de operare are loc la pornire si este specificata de starea pinului 20.
Descriere succinta a fiecarui pin: (Nr pinului - Numele pinului - Descriere
1 - VREF ADC VREF High = intrarea tensiunii de referinta pentru placa ADC. Pentru un semnal cat mai bun acest pin trebuie legat la VDDA.
2 - RESET �0� pe acest pin reseteaza MC3PHAC. Toate iesirile PWM sunt setate pe inalta impedanta. Acest pin este unul bidirectional ce permite resetarea intregului sistem. Se muta in �0� atunci cand este detectat un reset in sistem (ex. pierderea ceasului).
3 - VDDA VDD (Analogic) = alimenteaza portiunile analogice ale MC3PHAC, care includ si circuitul de generare al semnalului de tact (PLL) si ADC.
4 - VSSA VSS (Analogic) = alimentarea (masa) portiunilor analogice ale MC3PHAC, care includ si circuitul de generare al semnalului de tact (PLL) si ADC.
5 - OSC2 Osc Out � iesirea oscilatorului cu cristalul de cuart (a circuitului de ceas). Corectitudinea ceasului este data de oscilatorul de 4 MHz.
6 - OSC1 Osc In � intrarea oscilatorului cu cristalul de cuart (a circuitului de ceas). Poate accepta si un semnal extern. Corectitudinea ceasului este data de oscilatorul de 4 MHz.
7 - PLLCAP PLL Damp � un condensator legat de la acest pin la masa afecteaza stabilitatea si timpul de reactie al circuitului de ceas PLL. Valori mari dau o stabilitate mai buna. O valoare tipica este de 0.1 microFarad.
8 - PWMPOL_BASEFREQ PWM Pol/Base Speed � intrare specifica initializarii care determina polaritatea PWM si viteza de baza (50 sau 60 Hz)
9 - PWM_U_TOP PWM U Top � semnalul de iesire PWM pentru comanda tranzistorului de sus pentru faza U
10 - PWM_U_BOT PWM U Bottom - semnalul de iesire PWM pentru comanda tranzistorului de jos pentru faza U
11 - PWM_V_TOP PWM V Top - semnalul de iesire PWM pentru comanda tranzistorului de sus pentru faza V
12 - PWM_V_BOT PWM V Bottom - semnalul de iesire PWM pentru comanda tranzistorului de jos pentru faza V
13 - PWM_W_TOP PWM W Top - semnalul de iesire PWM pentru comanda tranzistorului de sus pentru faza W
14 - PWM_W_BOT PWM W Bottom - semnalul de iesire PWM pentru comanda tranzistorului de jos pentru faza W
15 - FAULTIN Fault In � �1� pe aceasta intrare dezactiveaza imediat iesirile PWM. Cand pinul va trece in starea �0� se va reincerca activarea.
16 - PWMFREQ_RxD PWM Freq/Rx Data � in modul independent acest pin este o iesire care trece �n �0� pentru a indica faptul ca pinul MUX_IN citeste o tensiune analogica pentru a determina o frecventa PWM dorita. In modul integrat (host) acest pin este o intrare ce primeste date serial (SCI).
17 - RETRY_Tx Retry Time/Tx Data � in modul independent acest pin este o iesire care trece �n �0� pentru a indica faptul ca pinul MUX_IN citeste o tensiune analogica pentru a specifica un timp de pauza dupa o eroare inainte de a reactiva iesirile PWM. In modul integrat acest pin este o intrare ce primeste date serial.
18 - RBRAKE R Brake � acest pin este o iesire care trece �n starea �1� de fiecare data cand tensiunea de alimentare depaseste o valoare prestabilita. Acest semnal se doreste sa conecteze un rezistor in paralel pe capacitatea de filtraj a alimentarii pentru a preveni cresterea tensiunii.
19 - DT_FAULTOUT Dead-Time/Fault Out � in modul independent acest pin este este o iesire care trece �n �0� pentru a indica faptul ca pinul MUX_IN citeste o tensiune analogica pentru a specifica timpul mort intre starile de pornire ale semnalelor PWM de sus si jos pentru o faza data. In modul integrat este un pin care trece �n �0� de fiecare data cand apare o eroare.
20 - VBOOST_MODE Vboost/Mode Select � la pornire daca acest pin se afla �n starea �1� rezulta modul independent de functionare, daca �0� � modul integrat. In modul independent este folosit si ca o iesire care daca trece �n starea �0� indica faptul ca pinul MUX_IN detecteaza o tensiune analogica ce specifica valoare tensiunii de boost a motorului.
21 - VDD +5 V alimentare pentru MC3PHAC
22 - VSS masa pt alimentarea de +5 V pentru MC3PHAC
23 - FWD Forward/Reverse � acest pin este o intrare care stabileste �n ce sens se va roti motorul.
24 - START Start/Stop � acest pin este o intrare care stabileste daca motorul se roteste sau nu.
25 - MUX_IN Mux In � In modul independent, in timpul initializarii, este un pin care determina polaritatea PWM si viteza de baza. Altfel, este o intrare analogica ce citeste anumite nivele de tensiune corespunzatoare parametrilor sistemului MC3PHAC.
26 - SPEED Speed In - In modul independent, in timpul initializarii, este un pin care determina polaritatea PWM si viteza de baza. Altfel, este o intrare analogica ce citeste nivelul tensiunii corespunzator vitezei motorului.
27 - ACCEL Acceleration In - In modul independent, in timpul initializarii, este un pin care determina polaritatea PWM si viteza de baza. Altfel, este o intrare analogica ce citeste nivelul tensiunii corespunzator acceleratiei motorului.
28 - DC_BUS Dc Bus In - In modul independent, in timpul initializarii, este un pin care determina polaritatea PWM si viteza de baza. Altfel, este o intrare analogica ce citeste nivelul de tensiune proportional cu tensiunea de alimentare.
Modul de lucru independent
Daca pinul VBOOST_MODE este in starea �1� cand MC3PHAC este pornit, sau dupa ce este
resetat, MC3PHAC trece in modul independent. In acest mod functionalitatea unor pini
se schimba in sensul ca dispozitivul poate controla un motor fara sa astepte informatii
de la o componenta externa (PC). Controllerul va comanda diferiti pini chiar in timp ce
monitorizeaza starea altora.
In multe cazuri, parametrul care trebuie specificat este reprezentat de o tensiune analogica data pe pinul MUX_IN in timp ce alti pini sunt in starea �0�. In acest fel MC3PHAC se poate conecta la un mux analogic care va comuta semnalele de la intrarea MUX_IN, atunci cand semnalul selectat va trece in starea �0�.
Toate semnalele trebuie sa fie cuprinse in intervalul 0 V si valoarea maxima ADCVREF. Ca o alternativa economica, poate fi conectata o retea pasiva pentru fiecare parametru de iesire si intrarea MUX_IN ca in figura de mai jos.
Impedanta echivalenta a acestei retele pasive, vazuta de pinul MUX_IN este foarte importanta si va trebui sa se afle in intervalul ( 5-10 ) kiloohmi. Daca rezistenta este prea mare, cresterea curentului prin pinii de intrare/iesire va cauza o tensiune de offset care va afecta citirea corecta a starilor.
Pinul de intrare START este intotdeauna urmarit. Intrarea este sensibila, dar pinul trebuie sa fie in starea �1� inainte ca �0� sa fie recunoscut ca un semnal de start. Aceasta este o masura de prevenire a pornirii accidentale a motorului in cazul in care MC3PHAC este alimentat iar comutatorul este in pozitia de start.
In multe cazuri, parametrul care trebuie specificat este reprezentat de o tensiune analogica data pe pinul MUX_IN in timp ce alti pini sunt in starea �0�. In acest fel MC3PHAC se poate conecta la un mux analogic care va comuta semnalele de la intrarea MUX_IN, atunci cand semnalul selectat va trece in starea �0�.
Toate semnalele trebuie sa fie cuprinse in intervalul 0 V si valoarea maxima ADCVREF. Ca o alternativa economica, poate fi conectata o retea pasiva pentru fiecare parametru de iesire si intrarea MUX_IN ca in figura de mai jos.
Impedanta echivalenta a acestei retele pasive, vazuta de pinul MUX_IN este foarte importanta si va trebui sa se afle in intervalul ( 5-10 ) kiloohmi. Daca rezistenta este prea mare, cresterea curentului prin pinii de intrare/iesire va cauza o tensiune de offset care va afecta citirea corecta a starilor.
Pinul de intrare START este intotdeauna urmarit. Intrarea este sensibila, dar pinul trebuie sa fie in starea �1� inainte ca �0� sa fie recunoscut ca un semnal de start. Aceasta este o masura de prevenire a pornirii accidentale a motorului in cazul in care MC3PHAC este alimentat iar comutatorul este in pozitia de start.
Sistemul de monitorizare si protectie
Din moment ce MC3PHAC este folosit pentru controlul invertoarelor de putere care
lucreaza cu tensiuni si curenti mari, are implementat un sistem de monitorizare si
protectie. Uneori, cand o problema este detectata MC3PHAC raspunde imediat incercand
sa restabilizeze situatia. In alte cazuri, sistemul PWM este imediat oprit pana cand
problema in cauza este rezolvata. Pentru doua din erorile ce ar putea aparea
(VDD mica si semnalul de ceas pierdut), controllerul se va restarta ducand PWM in
starea de inalta impedanta si fortand in acest fel resetarea ansamblului hardware
extern conectat la pinul de reset. Fiecare protectie este detaliata pe larg in cele
ce urmeaza:
- Tensiune inalta de alimentare � din moment ce PWM este comandat de MC3PHAC este posibil ca energia sa fie transferata de la motor catre sursa de alimentare in procesul de decelerare brusca. De multe ori, se previne aceasta situatie inmagazinandu-se aceasta energie intr-un condensator. Daca tensiunea de alimentare depaseste limita �Vbus Decel Value� descrisa in tabelul ce compara modurile de functionare, MC3PHAC va reduce deceleratia in incercarea de a restabili regenerarea. De asemenea, daca se depaseste valoarea �Vbus Rbrake Value� controllerul va activa pinul RBRAKE care va pune in paralel o rezistenta pe care se va descarca condensatorul in schimbul mentinerii energiei.
- Supratensiune de alimentare � daca tehnica descrisa anterior nu da rezultate in limitarea corecta a tensiunii, iar tensiunea depaseste �Vbus Overvoltage Value� descrisa in acelasi tabel ca precedenta, iesirile PWM sunt blocate imediat si vor ramane asa pana cand tensiunea va scadea la o valoare acceptata si va trece pauza ce va indica siguranta repornirii invertorului.
- Tensiune scazuta de alimentare � daca tensiunea de alimentare scade prea mult unele etaje vor functiona incorect cauzand probleme altora. Daca tensiunea scade sub valoarea �Vbus Undervoltage Value� iesirile PWM vor fi dezactivate si reactivate in aceleasi conditii ca si mai sus.
- Eroare externa � MC3PHAC contine o intrare numita FAULT IN care permite sesizarea erorilor altor sisteme. Utilizatorul are posibilitatea sa determine ce parametru va fi monitorizat pe acest pin. Fata de erorile tratate anterior in care era vorba de pinul DC BUS IN, acesta este o intrare digitala care duce la inchiderea imediata a PWM. In momentul cand intrarea isi schimba starea PWM se va reactiva, bineinteles dupa ce va trece pauza care inseamna ca poare fi realimentat invertorul.
- detectia tactului pierdut � pierderea tactului pentru MC3PHAC reprezinta o conditie periculoasa in functionarea motorului. Efectul pierderii tactului este acela ca semnalul PWM va ramane in aceeasi stare lasand in conductie anumiti tranzistori din invertor ceea ce va duce la distrugerea ori a motorului, ori a invertorului, ori ale ambelor componente. Aceasta problema este eliminata prin resetarea sistemului si dezactivarea imediata a iesirilor PWM.
- protectie la VDD mica � la fel ca si pierderea ceasului, o valoare scazuta a VDD poate cauza blocarea functionarii sistemului. MC3PHAC contine un modul ce monitorizeaza tensiunea si care va reseta sistemul in cazul in care VDD va scadea sub 4 V.
Scheme modul microcontroller



Montajul de test - prototip
CONVERTOR STATIC DE FRECVENTA - HOME MADE - PENTRU MOTOR ASINCRON TRIFAZAT











Reference:
- CONTRIBUTII PRIVIND PERFECTIONAREA SISTEMELOR DE ACTIONARE UTILIZAND CONVERTIZOARE STATICE DE FRECVENTA
Autor: Stefan Suceveanu - Teza de doctorat
Conducattor stiintific - Dimitrie Alexa
UNIVERSITATEA TEHNICA GH. ASACHI - IASI - 1998
- MOTOARE ASINCRONE - ACTIONARI CU VITEZA REGLABILA
Actionari cu motoare asincrone de mica putere cu performante economice si siguranta ridicate
G. VELICHI*, V. RADUT**
UPB Facultatea de Electrotehnica,
http://lees.amotion.pub.ro/research/papers/pdf/2001-Electrotehnica.pdf
- ACTIONARI REGLABILE DE PERFORMANTA RIDICATA CU MOTOR ASINCRON
UPB Facultatea de Electrotehnica, Rezumatul tezei de doctorat, Bucuresti 2001, Sergiu Ambrosii
http://lees.amotion.pub.ro/research/th_asergiu.pdf
- ACTIONAREA MOTORULUI ASINCRON IN COLIVIE CE ANTRENEAZA MECANISMUL DE PIVOTARE A SUPRASTRUCTURILOR ESRC-2000 UTILIZAND MODULATIA SINUSOIDALA
Gh. Barbacioru - 8th International Conference Tg. Jiu 2002 - C. Brancusi University - Engineering Faculty
www.utgjiu.ro/conf/8th/s4/15.pdf
- SIMULATION OF AN INTEGRATED STARTER-ALTERNATOR SYSTEM FOR NEW-GENERATION AUTOVEHICLES
Tiberiu Moldovan, Mircea M. Radulescu, Gabriel Cimuca
Proceedings of the 4th Int. Conf. on Electromechanical and Power Systems, SIELMEN'04,
Chisinau, 26-27 sept. 2003.
http://users.utcluj.ro/~cimuca/papers/sielmen_2003.pdf
http://users.utcluj.ro/~cimuca/tmoldovan_publicatii.htm
http://users.utcluj.ro/~szabol/Reports/Rapcat_2005_ROM.pdf
- Raport de Cercetare
Grant: Studiu teoretic si experimental al sistemului starter-alternator integrat la autovehicule de noua generatie
Autor: Moldovan Tiberiu
Universitatea: Universitatea Tenhica din Cluj-Napoca
http://frf.cncsis.ro/documente/422AT237.doc
- ECHIPAMENTE TRIFAZATE PENTRU COMPENSAREA PUTERII DEFORMANTE PRODUSE DE SARCINI ECHILIBRATE
UPB Facultatea de Electrotehnica, Proiect de diploma 2002, Bratosin Laurentiu
http://lees.amotion.pub.ro/research/l_bratosin_an5.pdf
- SOFTSTARTERE ELECTRONICE SI ACTIONARI ELECTRICE PENTRU MOTOARE
Agenda electrica Moeller 02/05
http://www.agenda-electrica.ro/docs/sb0201y.pdf
- LOW COST 3-PHASE AC MOTOR CONTROL SYSTEM BASED ON MC68HC908MR24
AN 1664 Freescale Semiconductor
By Radim Visinka, Roznov System Application Laboratory, MOTOROLA, Czeh Republic
http://www.freescale.com/files/microcontrollers/doc/app_note/AN1664.pdf
- HIGH VOLTAGE MEDIUM POWER BOARD FOR THREE PHASE MOTORS
AN 1590 Freescale Semiconductor
By Ivan Skalka, Leos Chalupa, Radim Visinka
Industrial System Application Laboratory
Freescale, Roznov pod Radhostem, Czeh Republik
http://www.freescale.com/files/microcontrollers/doc/app_note/AN1590.pdf
- DESIGN AND ANALYSIS OF MODERN THREE-PHASE AC/AC POWER CONVERTERS FOR AC DRIVES AND UTILITY INTERFACE
A Dissertation by Sangshin Kwac, May 2005
http://txspace.tamu.edu/bitstream/1969.1/2336/1/etd-tamu-2005A-ENGR-Kwak.pdf
- AC/AC Power Conversion Based on Matrix Converter Topology with Unidirectional Switches - Siyoung Kim, Seung Kisul, Fellow, IEEE, and Thomas A.Lipo, Fellow, IEEE
IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL.36, NO.1, JANUARY/FEBRUARY 2000
http://www.ece.wisc.edu/~lipo/1998pub/98-05T.pdf
- A BIDIRECTIONAL, SINUSOIDAL, HIGH FRECQUENCY INVERTER DESIGN - E.Koutroulis, J.Chatzakis, K.Kalaitzakis and N.C.Voulgaris
http://www.elci.tuc.gr/downloads/Kalaitzakis/J.19.pdf
- Motor control
A reference guide
Motor control overview: Universal motor, Brush DC motor, Single-phase induction motor, Three-phase induction motor, Three-phase brushless DC motor, Stepper motor, Switched reluctance motor, pdf file
http://www.st.com/stonline/products/promlit/pdf/brmotor-0503.pdf
- AC INDUCTION MOTOR FUNDAMENTALS
AN 887 - Michrochip
Author: Rakesh Parekh, Microchip Technology Inc.
http://ww1.microchip.com/downloads/en/AppNotes/00887A.pdf
- DETERMINING MOSFET DRIVER NEEDS FOR MOTOR DRIVE APPLICATIONS
AN 898 - Michrochip
Author: Jamie Dunn, Microchip Technology Inc.
http://ww1.microchip.com/downloads/en/AppNotes/00898A.pdf
- SPEED CONTROL OF 3-PHASE INDUCTION MOTOR USING PIC18 MICROCONTROLLERS
AN 843 - Michrochip
Author: Padmaraja Yedamale, Microchip Technology Inc.
http://ww1.microchip.com/downloads/en/AppNotes/00843A.pdf
- Controlling 3-Phase AC Induction Motors Using the PIC18F4431
AN 900 - Michrochip
Author: Jon Burroughs, Microchip Technology Inc.
http://ww1.microchip.com/downloads/en/AppNotes/00900a.pdf
AN900 Source Code: http://ww1.microchip.com/downloads/en/AppNotes/AN900.zip
- USING THE PIC 18F2431 FOR SENSORLESS BLDC MOTOR CONTROL
AN 970 - Michrochip
Author: Padmaraja Yedamale, Microchip Technology Inc.
http://ww1.microchip.com/downloads/en/AppNotes/00970A.pdf
- DESIGN AND IMPLEMENTATION OF A LOW-COST SENSORLESS CONTROL FOR SYNCHRONOUS RELUCTANCE MOTORS
A.Bellini, F.Franceschini, M.Paladini, N.Petrolini, C.Tassoni, Universita di Parma, ITALY
http://www2.polito.it/ricerca/syncrodrive/parma/Report_Parma.pdf
- HIP4086 3-PHASE BRIDGE DRIVER CONFIGURATIONS AND APPLICATIONS
Application Note - AN9642.3 - Intersil
http://www.intersil.com/data/an/an9642.pdf
- AP-1491 THREE-PHASE BRIDGE IGBT DRIVER
Gate Drive Board for Three Phase and Full Bridge Inverters
Updated link (2013.03.03): http://info-mgt.net/aps/pdf/BAP1491.pdf
- SHD830004 - THREE-PHASE MOSFET/IGBT BRIDGE DRIVER
TECHNICAL DATA SHEET 548, SENSITRON SEMICONDUCTOR
http://www.rsm.com/data_sheets/548.pdf
- Abespecenie zasciti ot peregruzki v MOSFET draiverah
A.I. Kolakov
http://www.gaw.ru/html.cgi/txt/publ/igbt/protect.htm
- International Rectifier Application Notes
http://www.irf.com/technical-info/appnotes.htm
- Six-Output 600V MGDs Simplify 3-Phase Motor Drives
Application Note AN-985 International Rectifier
http://www.irf.com/technical-info/appnotes/an-985.pdf
- HV Floating MOS-Gate Driver ICs
Application Note AN-978 International Rectifier
http://www.irf.com/technical-info/appnotes/an-978.pdf
- Understanding HVIC Datasheet Specifications
By Satyavrat Laud
Application Note AN-1092 International Rectifier
http://www.irf.com/technical-info/appnotes/an-1092.pdf
- 3-Phase Bridge Drive With Overcurrent Protection
By Jamie Catt
DT 94-11 International Rectifier
http://www.irf.com/technical-info/designtp/dt94-11.pdf
- DN500
Short-Circuit Protection for Power Inverters
By Andrea Merello, International Rectifier
http://www.irf.com/technical-info/designnote/dn500.pdf
- DN501
Accurate Current Sensing in High Voltage Motor Drives
By Andrea Merello, International Rectifier
http://www.irf.com/technical-info/designnote/dn501.pdf
- DN502
Short-Circuit Protection for Three-Phase Power Inverters
By Andrea Merello, International Rectifier
http://www.irf.com/technical-info/designnote/dn502.pdf
- DT 97-4
Inrush Current Control in Motor Drives
By Ugo Robino and Alberto Guerra, International Rectifier
http://www.irf.com/technical-info/designtp/dt97-4.pdf
- DT 93-6B
Miniaturization of the Power Electronics for Motor Drives
By Gerry Limjuco and Dana Wilhelm, International Rectifier
http://www.irf.com/technical-info/designtp/dt93-6.pdf
- MASINA ASINCRONA
CONSTRUCTIE SI FUNCTIONARE
http://www.lei.ucl.ac.be/multimedia/eLEE/FR/realisations/MachinesElectriques/
Induction/ConstructionFonctionnement/ConstructionFonctionnement.pdf
- Probleme
Masina asincrona
http://www.iem.pub.ro/~mihaela/cursuri/masini_electrice-(convertoare electromecanice)/probleme/probleme masina asincrona.pdf
- MC3PHAC
A Complete Motor Control Solution
� Motorola, Inc. 2002 - BR1895/D, REV 1
http://www.psoc.cn/FileWarehouse/freescale/BR1895.pdf
- MC3PHAC: Motor Control Unit
Freescale Semiconductor
http://www.freescale.com/webapp/sps/site/prod_summary.jsp?code=MC3PHAC&nodeId=03M0ym4t3ZGM0zBPvKWQ#
- MC3PHAC Monolithic Intelligent Motor Controller
Data Sheet MC3PHAC - Rev. 2, 7/2005
Freescale Semiconductor
http://www.freescale.com/files/microcontrollers/doc/data_sheet/MC3PHAC.pdf?fpsp=1
- Ready-to-Use AC Induction Motor Controller IC for Low-Cost Variable Speed Applications
Rev. 0, 10/2005
by: Dave Wilson and Bill Lucas
Freescale Semiconductor, Inc.
http://www.freescale.com/files/microcontrollers/doc/white_paper/MC3PHACWP.pdf
- Using the MC3PHAC Motor Controller
by David Wilson
Motion Products Specialist
Freescale Semiconductor
Application Note AN2988 Rev. 1.2, 11/2005
http://www.freescale.com/files/microcontrollers/doc/app_note/AN2988.pdf?fpsp=1&WT_TYPE=Application Notes&WT_VENDOR=FREESCALE&WT_FILE_FORMAT=pdf&WT_ASSET=Documentation
- General-Purpose 3-Phase AC Industrial Motor Controller
Designer Reference Manual
MC3PHAC Motor Controller
DRM006/D - 4/2002
Freescale Semiconductor, Inc.
108 pag
http://www.freescale.com/files/microcontrollers/doc/ref_manual/DRM006.pdf
- MOTION CONTROL
Freescale Semiconductor, Inc.
Link indisponibil: http://www.freescale.com/webapp/sps/site/application.jsp?nodeId=02nQXGxQnb#solution
- Creating a Graphical User Interface (GUI) for the MC3PHAC
Freescale Semiconductor
Application Note AN2202/D - 5/2002
By: Steven Torres - Motorola
SPS TSPG 8-/16-Bit Division
http://www.freescale.com/files/microcontrollers/doc/app_note/AN2202.pdf?fpsp=1&WT_TYPE=Application Notes&WT_VENDOR=FREESCALE&WT_FILE_FORMAT=pdf&WT_ASSET=Documentation
- Microcontrollers
Quarter 3, 2004
SG1006Q32004 Rev.0
Freescale Semiconductor
http://www.qce.com.hk/test/products/freescale_images/SG1006.pdf
- MC3PHAC
Motor Control Demo Video - Note: 93MB File
http://www.freescale.com/files/microcontrollers/doc/train_ref_material/MC3PHACvideo.wmv?fpsp=1
- MC3PHAC
3-Phase AC Induction Motor Driver Source Code
https://www.freescale.com/webapp/Download?colCode=MC3PHACIC&prodCode=MC3PHAC&appType=license&location=null&fpsp=1
- MC3PHAC enable.asm Fault Modification
Freescale Semiconductor - Engineering Bulletin
EB655
Rev. 1.00, 08/2005
http://www.freescale.com/files/microcontrollers/doc/eng_bulletin/EB655.pdf?fpsp=1&WT_TYPE=Engineering Bulletins&WT_VENDOR=FREESCALE&WT_FILE_FORMAT=pdf&WT_ASSET=Documentation
- Insulated-Gate Transistors Simplify AC-Motor Speed Control
Fairchild Semiconductor, AN-7511, September 1993
http://www.fairchildsemi.com/an/AN/AN-7511.pdf
- Motor Control Power Semiconductor Applications, CHAPTER 3 - Philips Semiconductors
http://www.nxp.com/acrobat_download/applicationnotes/APPCHP3.pdf
- Power Electronics in Flywheel Storage Systems
Link reactualizat (2013.03.03): http://ewh.ieee.org/soc/pels/home/Flywheel-Storage-Systems.php
- Synthesis and analysis of harmonic-free three-phase inverters
http://ece-www.colorado.edu/~pwrelect/pubarch/Khan1994.pdf
- R�glage de la vitesse de rotation des moteurs asynchrones triphas�s
http://sitelec.free.fr/cours/abati/reglvit.htm
- IGBT or MOSFET: Choose Wisely
by Carl Blake and Chris Bull, International Rectifier
http://www.irf.com/technical-info/whitepaper/choosewisely.pdf
